Tac3D 机器人指尖触觉传感器
指尖触觉传感器Tac3D-A1,是清华大学自主机器人实验室(AutoRobot Lab) 面向科学研究推出的一款高性能多模态触觉传感器,具有接触形貌、三维变形场、接触分布力和六维集中力的精确、可靠测量功能,为增强机器人环境探索、自主交互、灵巧操作提供重要的手段。

传感器功能和测量范围
Tac3D 触觉传感器模拟人手触觉的多模态感知功能。可以测量其感知表面(sensing area)范围内的3D形貌(3D surface geometry)、3D位移场(3D displacement field)、 3D 分布力(3D distributed force)、3D 合力(3D resultant force)和 3D 合力矩(3D resultant moment)。
感知表面是 Tac3D 触觉传感器弹性体的弧面上的方形表面范围(不包括棱),如图 1-2 中绿色标注的区域。Tac3D-A1 系列传感器的感知表面的最大投影面积约为 20 mm × 20 mm。弹性体感知表面的保护层下布置 400 个 20 × 20 阵列分布的标志点(markers)。在关于分布力的描述中,标志点及其附近的小块表面区域也称为力测量点(force sensing points)。标志点/力测量点按行列顺序编号为 0 ~ 399 号。
Tac3D 触觉传感器工作时,感知表面和外部物体接触。弹性体因受到接触力而变形,标志点则随着弹性体的位移而移动。在此过程中,Tac3D 传感器将持续测量和追踪 400个标志点在传感器坐标系(详见 3.3 节)下的位置和位移,并根据标志点位移求解感知
表面所受到的分布力。
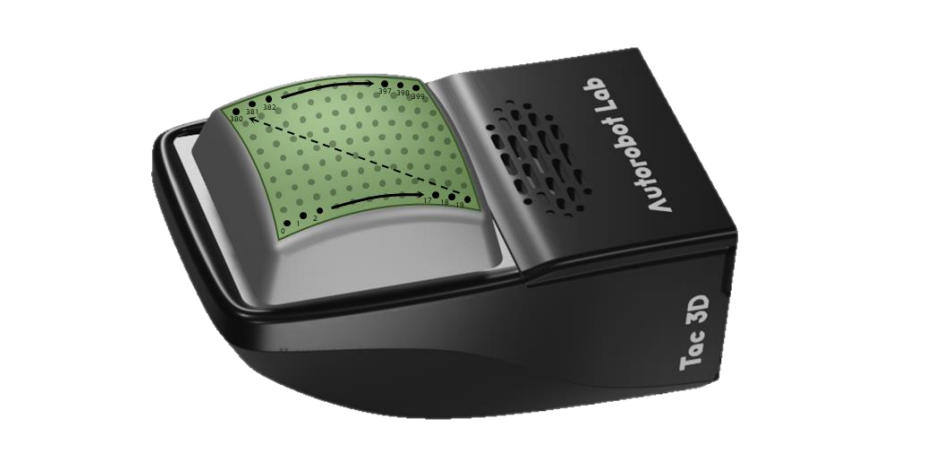
上面图显示 Tac3D 触觉传感器的感知表面和标志点/力测量点编号

上面图显示 Tac3D 触觉传感器测量 3D 形貌、3D 位移场、3D 分布力
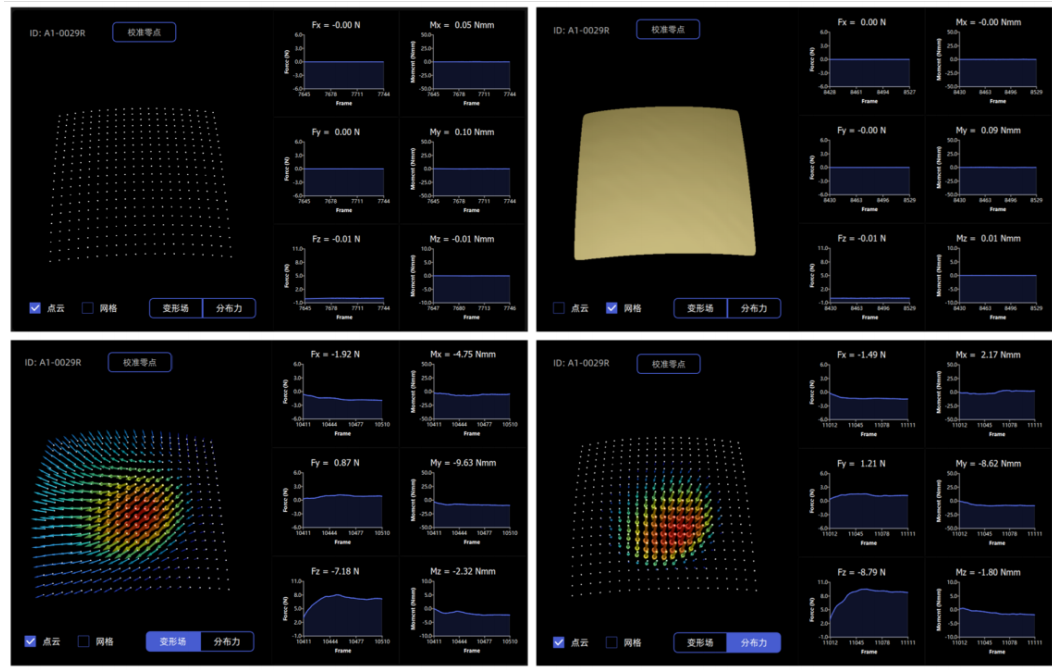
上面图显示 Tac3D-Desktop 软件提供的可视化选项(点云、网格、位移场、分布力)