HEBI X系列模块化关节
HEBI成立于2014年,由来自世界著名的卡内基梅隆大学机器人研究所的跨学科团队组成。HEBI 诞生于 CMU Biorobotics 实验室,由 Howie Choset 教授领导,专注于机器人硬件和软件,核心重点是运动控制。
HEBI的第一个模块化平台于 2016 年推出,目前在全球范围内被研究人员、大学和工业部门使用。Choset 教授的背后是一个由博士研究人员、工程师和技术人员组成的团队,他们在为航空航天工业、太空飞行和军事努力等领域创造机器人解决方案方面拥有丰富的经验。
创新驱动着 HEBI ,因为HEBI力求使机器人在现代商业中比以往任何时候都更容易获得、更具活力和更普遍。通过发展关于机器人能力的理念,HEBI可以解决问题并提供新的机会来扩展人类的视野。每一天,HEBI都在创造变革性技术,从根本上改变我们世界的运作方式。
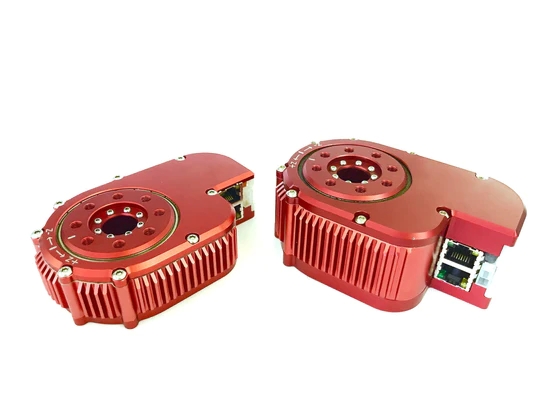
HEBI X系列模块化关节可以让工程师、研究人员、系统集成商甚至大学生能够快速、轻松地定制出任何配置的科研级机器人。这些模块化关节都装有传感器,能够进行位置、速度和灵敏的转矩控制以及三轴惯性测量。
HEBI X系列模块化关节可以让工程师、研究人员、系统集成商甚至大学生能够快速、轻松地定制出任何配置的科研级机器人。
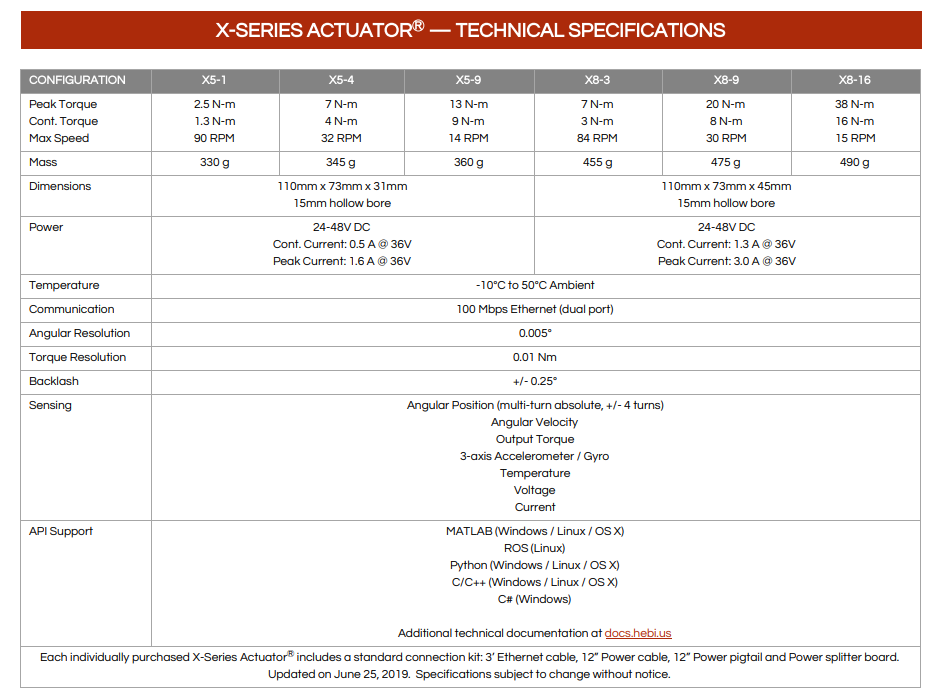
这些模块化关节都装有传感器,能够进行位置、速度和灵敏的转矩控制以及三轴惯性测量。 每个模块化关节都是一个串联的弹性驱动器,它将无刷电机、齿轮传动链、弹簧、编码器和控制电子元件紧凑地集成到一起。支持18V-48V直流电源,使用标准的10/100Mbps以太网进行通信。
标准的接口、网络连接和软件工具便开发者不必从底层开始开发,花费更少的时间和精力即可取得更快的研发进展。 HEBI X系列模块化关节不是一个简单的伺服电机,而是一个功能齐全的机器人组件。它可连续旋转,无需校准或归位开机,并包含一个便于布线的通孔。这使得这些模块化关节可用于从轮式机器人到多自由度协作机器人手臂的任何机器人。HEBI Robotics官方还提供了丰富的跨平台软件工具,如实时绘图、MATLAB、ROS和C / C++ 的API等,这些工具使配置和控制HEBI X系列模块化关节变得轻而易举 。
每个模块化关节都是一个串联的弹性驱动器,它将无刷电机、齿轮传动链、弹簧、编码器和控制电子元件紧凑地集成到一起。支持18V-48V直流电源,使用标准的10/100Mbps以太网进行通信。标准的接口、网络连接和软件工具使开发者不必从底层开始开发,花费更少的时间和精力即可取得更快的研发进展。
HEBI X系列模块化关节不是一个简单的伺服电机,而是一个功能齐全的机器人组件。它可连续旋转,无需校准或归位开机,并包含一个便于布线的通孔。这使得这些模块化关节可用于从轮式机器人到多自由度协作机器人手臂的任何机器人。HEBI Robotics官方还提供了丰富的跨平台软件工具,如实时绘图、MATLAB、ROS和C / C++ 的API等,这些工具使配置和控制HEBI X系列模块化关节变得轻而易举...
- 产品特点
- 快速搭建机器人;
全模式安全机制保护;
硬实时底层系统架构;
扭矩反馈与控制;
线程级电机控制策略;
耐冲击,精度,可复用;
支持机器学习,人机协作;
支持ROS,提供多种API。
- 产品应用
- 快速搭建原型机-机器学习算法-研究全关节运动控制-分析实时增益-控制调整分析-硬实时系统-架构应用分析
-